The linear descriptors of motion (i.e. displacement, velocity, and acceleration) all have corresponding translations in rotational motion:
This is an accordion element with a series of buttons that open and close related content panels.
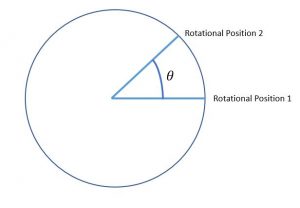
Angular Displacement
The rotational equivalent of displacement, the angular displacement describes the position of an object around a fixed axis. This is expressed by the variable θ is usually measured in radians (1 radian = 180°/π).
Angular Velocity
The rotational equivalent of velocity, the angular velocity describes how the angular position θ changes with time (the rate of change of angular displacement). This is expressed by the variable ω and is usually measured in radians/second.
Angular Acceleration
The rotational equivalent of acceleration, the angular acceleration describes how the angular velocity ω changes with time (the rate of change of angular velocity). This is expressed by the variable α and is usually measured in radians/second².
Torque
Just as a force can cause a linear acceleration, a torque causes an angular acceleration. The torque is found by multiplying the distance between the force and the axis of rotation (r) by the magnitude of the force in perpendicular to the radius between the site of application to the rotational axis (F sin[θ]).
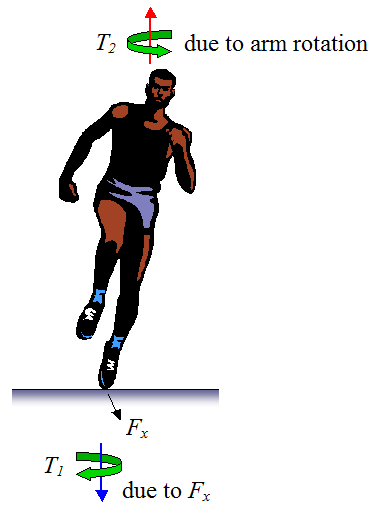
Benefits of Arm Swinging:
As seen in the diagram to the right, the propulsive force exerted by the left foot causes a torque on the torso in the clockwise direction. This causes the runner to begin to twist. In order to offset this torque, the runner swings his arm in the opposite direction, causing his torso to rotate in the opposite direction. The counter-torque produced by the swinging of the arms allows the runner to keep facing forward.
When the right foot hits ground, the torque exerted by the propulsive force is in the opposite direction. Thus the arms swing in the opposite direction.
This physical principle explains the unconscious arm swinging that occurs when we run.